Fagots

 Si les chasseurs MiG-15 "Fagot" étaient initialement équipés en série d'un appareil photo AFA-IM (> Lien), il n'en restait pas moins un véritable chasseur, révélé lors de la guerre de Corée. Cependant, faisant suite à une directive du Conseil des Ministres, l'OKB-155 de Mikoyan reçu pour instruction en avril 1950 de développer une variante de reconnaissance du MiG-15
emportant un appareil AFA-BA/40 (> Lien 1 / > Lien 2).
L'appareil choisi pour être ainsi modifié était un MiG-15bis qui reçu la désignation SR (Samolet Razvedtchik - Avion de Reconnaissance). La caméra était montée entre les canons sur le châssis d'accès à ces derniers, entre les couples 8a et 9, soit au même emplacement que l'AFA-IM sur le MiG-15. Les MiG-15 et MiG-15bis "Fagot-B" disposaient d'un armement similaire composé d'un canon N-37 de 37mm sur le côté droit du nez et de deux canons NR-23 de 23mm à gauche. Mais l'appareil AFA-BA/40 d'une focale de 400mm étant plus volumineux que l'AFA-IM, le canon NR-23 intérieur n'était pas monté sur le SR afin de libérer l'espace pour la caméra. Un carénage nouveau prolongeait celui d'origine du NR-23 externe, constituant ainsi le seul moyen d'identifier un MiG-15bis de reconnaissance sans rechercher la trappe ventrale cachant les optiques.
Si les chasseurs MiG-15 "Fagot" étaient initialement équipés en série d'un appareil photo AFA-IM (> Lien), il n'en restait pas moins un véritable chasseur, révélé lors de la guerre de Corée. Cependant, faisant suite à une directive du Conseil des Ministres, l'OKB-155 de Mikoyan reçu pour instruction en avril 1950 de développer une variante de reconnaissance du MiG-15
emportant un appareil AFA-BA/40 (> Lien 1 / > Lien 2).
L'appareil choisi pour être ainsi modifié était un MiG-15bis qui reçu la désignation SR (Samolet Razvedtchik - Avion de Reconnaissance). La caméra était montée entre les canons sur le châssis d'accès à ces derniers, entre les couples 8a et 9, soit au même emplacement que l'AFA-IM sur le MiG-15. Les MiG-15 et MiG-15bis "Fagot-B" disposaient d'un armement similaire composé d'un canon N-37 de 37mm sur le côté droit du nez et de deux canons NR-23 de 23mm à gauche. Mais l'appareil AFA-BA/40 d'une focale de 400mm étant plus volumineux que l'AFA-IM, le canon NR-23 intérieur n'était pas monté sur le SR afin de libérer l'espace pour la caméra. Un carénage nouveau prolongeait celui d'origine du NR-23 externe, constituant ainsi le seul moyen d'identifier un MiG-15bis de reconnaissance sans rechercher la trappe ventrale cachant les optiques.
 L'avion fut également soumis à d'autres modifications visant à éliminer des défauts constatés sur le MiG-15 comme la buée ou le givre; un filtre chimique fut installé afin de traiter l'air vicié du cockpit ou encore le système de pressurisation fut amélioré. Mais les essais conduits entre août et septembre révélèrent de nombreuses insuffisances telles qu'une couverture photographique insuffisante, l'absence de pivots sur la caméra (bien que pas demandé), ou un mauvais fonctionnement du système d'air conditionné. L'avion conservait néanmoins ses performances et ses capacités de combat et permettait d'exécuter des vols de reconnaissance tactique.
Afin d'accroître l'autonomie, les nouveaux points d'attache alaires D4-50 permettaient d'y fixer des réservoirs plaqués sous les ailes d'une capacité accrue de 600 litres.
L'avion fut également soumis à d'autres modifications visant à éliminer des défauts constatés sur le MiG-15 comme la buée ou le givre; un filtre chimique fut installé afin de traiter l'air vicié du cockpit ou encore le système de pressurisation fut amélioré. Mais les essais conduits entre août et septembre révélèrent de nombreuses insuffisances telles qu'une couverture photographique insuffisante, l'absence de pivots sur la caméra (bien que pas demandé), ou un mauvais fonctionnement du système d'air conditionné. L'avion conservait néanmoins ses performances et ses capacités de combat et permettait d'exécuter des vols de reconnaissance tactique.
Afin d'accroître l'autonomie, les nouveaux points d'attache alaires D4-50 permettaient d'y fixer des réservoirs plaqués sous les ailes d'une capacité accrue de 600 litres.
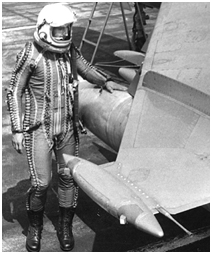
 Alexei Leonov de retour à Altenburg en 1965 après son vol historique du 18 mars 1965 dans l'espace, descend du MiG-15Rbis "14" bleu. © L.Borisova.
Alexei Leonov de retour à Altenburg en 1965 après son vol historique du 18 mars 1965 dans l'espace, descend du MiG-15Rbis "14" bleu. © L.Borisova.
Alexei Leonov returned to Altenburg in 1965 after his historic space flight of March 18, 1965. Here aboard MiG-15Rbis blue 14. © L.Borisova.
En août 1951, le Conseil des Ministres reconnaissait que le besoin de nouveaux moyens de reconnaissance ne pouvait être éludé et le SR fut accepté en service sous la désignation de MiG-15Rbis (1) (Article 55) dont 364 exemplaires furent fabriqués par l'usine n°21 de Gorki en même temps que les MiG-15bis. Les MiG-15Rbis pouvaient couvrir une bande de 900 mètres à 4,5 km de large sur une distance variant entre 90 et 450 km depuis une altitude de 2000 à 10000 mètres. Les MiG-15Rbis étaient limités à des reconnaissances diurnes à courte distance, tandis que les Il-28R pouvaient opérer plus loin de jour comme de nuit.
Les premiers avions de reconnaissance à réaction basés en RDA furent les MiG-15Rbis du 294.ORAP.
Ce régiment n'a pas connu la Seconde Guerre mondiale, mais a été activé en mars 1951 à Strausberg en RDA. Sa première base opérationnelle fut Köthen où il s'établit en novembre 1951.
Le 294.ORAP connaîtra ensuite diverses mutations : Welzow en 1953, Köthen à nouveau en 1954, Altenburg en 1955 et finalement Allstedt en 1967- voir l'ordre de bataille.
C'est lorsque le régiment était basé à Altenburg, que le futur cosmonaute Alexei Leonov qui devint le premier
homme à "marcher" dans l'espace le 18 mars 1965, y fut affecté en décembre 1959 (> Lien 1 /
> Lien 2).
Si le 294.ORAP retira du service ses derniers MiG-15Rbis en 1968, les biplaces UTI MiG-15 dont il était aussi équipé restèrent actifs jusqu'en 1974. Les premiers MiG-21R rejoignirent le régiment à partir de novembre 1966.
| ORBAT 1945 - 1993 |
Fishbeds
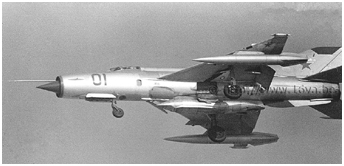 C'est donc le MiG-21R "Fishbed-H" qui succéda au MiG-15Rbis au sein du 294.ORAP, ce qui représentait un grand bouleversement, aussi bien en ce qui concernait l'avion lui-même que les moyens de reconnaissance qu'il était susceptible d'emporter. Le prototype du MiG-21R, construit comme le MiG-15Rbis à l'usine n°21 de Gorki, était basé sur la conversion d'une cellule d'intercepteur MiG-21PF "Fishbed-D". Le réacteur R-11F2-300 de 3950 kgp à sec (6120 avec PC) fut remplacé par un modèle R-11F2S-300 assurant le soufflage de la couche limite au-dessus de volets afin d'accroître davantage la portance lorsque ces derniers étaient sortis. Extérieurement, le prototype ressemblait à un MiG-21PFS avec sa dérive à petite corde et le parachute de freinage relocalisé à la base de la dérive. Cependant, de petits carénages en forme de cigare abritant les antennes d'un détecteur d'alerte radar SPO-3 "Sirena" furent montés en guise de saumons d'ailes. Il était prévu que différents conteneurs de reconnaissance puissent être montés alternativement en point d'emport ventral. Afin de compenser l'indisponibilité de ce dernier qui était le seul où un réservoir supplémentaire pouvait être accroché, deux points d'attache pouvant recevoir des réservoirs additionnels PTB-490 de 490 litres furent ajoutés à l'extérieur des deux pylônes alaires déjà existants. Le tube pitot PVD-7 monté en position centrale au-dessus de l'entrée d'air du réacteur gênant la vue du pilote vers le bas fut décalè à droite. Le premier vol du Ye-7R tel qu'il fut désigné eut lieu en 1964.
C'est donc le MiG-21R "Fishbed-H" qui succéda au MiG-15Rbis au sein du 294.ORAP, ce qui représentait un grand bouleversement, aussi bien en ce qui concernait l'avion lui-même que les moyens de reconnaissance qu'il était susceptible d'emporter. Le prototype du MiG-21R, construit comme le MiG-15Rbis à l'usine n°21 de Gorki, était basé sur la conversion d'une cellule d'intercepteur MiG-21PF "Fishbed-D". Le réacteur R-11F2-300 de 3950 kgp à sec (6120 avec PC) fut remplacé par un modèle R-11F2S-300 assurant le soufflage de la couche limite au-dessus de volets afin d'accroître davantage la portance lorsque ces derniers étaient sortis. Extérieurement, le prototype ressemblait à un MiG-21PFS avec sa dérive à petite corde et le parachute de freinage relocalisé à la base de la dérive. Cependant, de petits carénages en forme de cigare abritant les antennes d'un détecteur d'alerte radar SPO-3 "Sirena" furent montés en guise de saumons d'ailes. Il était prévu que différents conteneurs de reconnaissance puissent être montés alternativement en point d'emport ventral. Afin de compenser l'indisponibilité de ce dernier qui était le seul où un réservoir supplémentaire pouvait être accroché, deux points d'attache pouvant recevoir des réservoirs additionnels PTB-490 de 490 litres furent ajoutés à l'extérieur des deux pylônes alaires déjà existants. Le tube pitot PVD-7 monté en position centrale au-dessus de l'entrée d'air du réacteur gênant la vue du pilote vers le bas fut décalè à droite. Le premier vol du Ye-7R tel qu'il fut désigné eut lieu en 1964.
 Détail du carénage d'antennes du système SPO-3 sur un MiG-21R polonais. Cet avion était apparemment armé avec des missiles RS-2US accrochés sous les pylônes internes. © DR.
Détail du carénage d'antennes du système SPO-3 sur un MiG-21R polonais. Cet avion était apparemment armé avec des missiles RS-2US accrochés sous les pylônes internes. © DR.
Close up on the antenna fairing of the SPO-3 system on a Polish AF MiG-21R. This aircraft was apparently armed with RS-2US missiles under the
inboard pylons. © DR.
Deux autres prototypes furent convertis à partir de cellules de MiG-21PFS. Ces derniers avaient plutôt l'apparence de MiG-21PFM avec leur dérive à large corde et le cockpit s'ouvrant latéralement plutôt que se relevant vers l'avant. Les essais en vol soulignèrent le manque d'autonomie de l'appareil malgré l'emport de deux réservoirs supplémentaires. Aussi, l'arête dorsale du fuselage fut élargie et prolongée jusqu'à la derive afin d'y loger un réservoir de 340 litres, portant la capacité totale interne à 2800 litres. On trouvait sur cette arête dorsale un peu avant la dérive un mystérieux panneau diélectrique qui abritait peut-être l'antenne VHF de l'émetteur qui permettait au pilote de transmettre des information directement par radio sur de longues distances. Le MiG-21R était aussi le premier modèle du "Fishbed" équipé d'un indicateur d'angle d'attaque dont le sonde DUA-3 était actionnée par une vanne montée sur le côté gauche du nez, caractéristique que l'on retrouvera ensuite sur toutes les versions ultérieures du MiG-21 monoplace et du MiG-21UM biplace.
La production du MiG-21R (Article 94R puis O3) débuta en 1965 pour se poursuivre jusqu'en 1971.
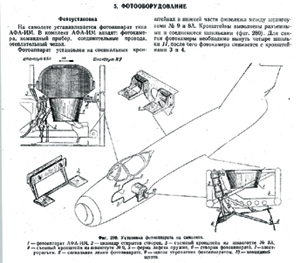
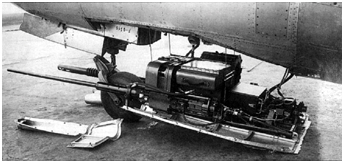
Différents conteneurs de reconnaissance longs de cinq mètres permettaient aux MiG-21R d'assurer leur mission. Ceux emportés couramment étaient les trois modèles suivants :
 - Modèle "D" (Dnevnaya fotorazvedka - reconnaissance photo de jour). Ce conteneur présentait un décrochage marqué sous son nez afin de permettre la photographie vers l'avant.
Il emportait sept caméras dont six appareils A-39 (> Lien). Une paire de ces derniers était logée derrière
le décrochage antérieur afin de couvrir le secteur situé sous l'axe de vol de l'avion.
Les quatre autres A-39 se trouvaient à l'arrière de la nacelle, également disposées par paires, l'une couvrant le secteur gauche et l'autre le secteur droit.
La septième caméra de type AChtchAFA-5M (> Lien) destinée à couvrir
des bandes de terrain (voir les deux orifices rectangulaires sur la photo ci-dessus) prenait place juste derrière les deux caméras A-39 pointées vers l'avant.
La superficie couverte par les caméras verticales correspondait à 0,7 fois l'altitude de vol et deux fois pour les caméras obliques.
On trouvait dans la pointe arrière le complexe SPO-3 dont les antennes étaient logées dans les carénages situés aux saumons d'ailes, un enregistreur à bandes magnétiques
Lira et un système de lance-leurres ASO-2I composé de deux cassettes KDS-19 pouvant tirer chacune 32 cartouches de leurres thermiques ou contenant des bandelettes métalliques.
- Modèle "D" (Dnevnaya fotorazvedka - reconnaissance photo de jour). Ce conteneur présentait un décrochage marqué sous son nez afin de permettre la photographie vers l'avant.
Il emportait sept caméras dont six appareils A-39 (> Lien). Une paire de ces derniers était logée derrière
le décrochage antérieur afin de couvrir le secteur situé sous l'axe de vol de l'avion.
Les quatre autres A-39 se trouvaient à l'arrière de la nacelle, également disposées par paires, l'une couvrant le secteur gauche et l'autre le secteur droit.
La septième caméra de type AChtchAFA-5M (> Lien) destinée à couvrir
des bandes de terrain (voir les deux orifices rectangulaires sur la photo ci-dessus) prenait place juste derrière les deux caméras A-39 pointées vers l'avant.
La superficie couverte par les caméras verticales correspondait à 0,7 fois l'altitude de vol et deux fois pour les caméras obliques.
On trouvait dans la pointe arrière le complexe SPO-3 dont les antennes étaient logées dans les carénages situés aux saumons d'ailes, un enregistreur à bandes magnétiques
Lira et un système de lance-leurres ASO-2I composé de deux cassettes KDS-19 pouvant tirer chacune 32 cartouches de leurres thermiques ou contenant des bandelettes métalliques.
 - Modèle "N" (Nochnaya fotorazvedka - reconnaissance photo de nuit). Cette version dédiée à la reconnaissance nocturne contenait une caméra UA-47
(> Lien) composée de deux objectifs inclinés à 160° vers la gauche et la droite.
La photographie de nuit était rendue possible grâce à quatre cassettes KDF-38 contenant au total 152 fusées éclairantes FP-100, qui occupaient près d'un tiers du conteneur.
Un système de lance-leurres ASO-2I prenait place dans la pointe arrière. La nacelle "N" comprenait également l'enregistreur Lira et le complexe SPO-3.
- Modèle "N" (Nochnaya fotorazvedka - reconnaissance photo de nuit). Cette version dédiée à la reconnaissance nocturne contenait une caméra UA-47
(> Lien) composée de deux objectifs inclinés à 160° vers la gauche et la droite.
La photographie de nuit était rendue possible grâce à quatre cassettes KDF-38 contenant au total 152 fusées éclairantes FP-100, qui occupaient près d'un tiers du conteneur.
Un système de lance-leurres ASO-2I prenait place dans la pointe arrière. La nacelle "N" comprenait également l'enregistreur Lira et le complexe SPO-3.
 - Modèle "R" (Radiotekhnicheskaya razvedka - reconnaissance électronique). Ce conteneur se reconnaissait aisément grâce aux grands panneaux diélectriques
des systèmes SIGINT SRS-6 Romb-4A et SRS-7 Romb-4B (Losange) qui ornaient ses flancs. Les signaux électromagnétiques captés par cette suite de détection/classification/localisation
des radars, étaient enregistrés sur fil magnétique.
Une caméra A-39 était conservée à l'avant, tandis qu'un système de lance-leurres ASO-2I et le complexe SPO-3 occupaient la pointe arrière.
- Modèle "R" (Radiotekhnicheskaya razvedka - reconnaissance électronique). Ce conteneur se reconnaissait aisément grâce aux grands panneaux diélectriques
des systèmes SIGINT SRS-6 Romb-4A et SRS-7 Romb-4B (Losange) qui ornaient ses flancs. Les signaux électromagnétiques captés par cette suite de détection/classification/localisation
des radars, étaient enregistrés sur fil magnétique.
Une caméra A-39 était conservée à l'avant, tandis qu'un système de lance-leurres ASO-2I et le complexe SPO-3 occupaient la pointe arrière.
 Des pilotes du 294.ORAP discutent le coup devant un MiG-21R camouflé porteur d'une nacelle de reconnaissance. © DR.
Des pilotes du 294.ORAP discutent le coup devant un MiG-21R camouflé porteur d'une nacelle de reconnaissance. © DR.
294.ORAP pilots discussing tactics in front of a camouflaged MiG-21R equipped with a reconnaissance pod. © DR.
D'autres modèles de conteneurs auraient été utilisés par les MiG-21R, mais pas forcément au sein du 294.ORAP.
Le modèle "T" (Televizionniy Aviatsionniy Razvedyvatel'niy Komplex ou TARK - complexe de reconnaissance aérienne par télévision) retransmettait en temps
réel les images filmées vers une station au sol grâce au système Bariy (Baryum). Une autre nacelle aurait emporté un système de reconnaissance diurne et nocturne par laser Chpil' (Flèche) avec
liaison data link. Un troisième conteneur était équipé d'un système d'imagerie thermique Prostor (Espace).
En outre, le MiG-21R était susceptible d'emporter un conteneur vraisemblablement de type RR8311-100 (> Photo)
destiné à mesurer le taux de radioactivité dans l'air ambiant.
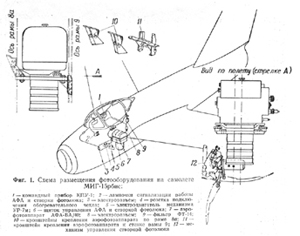
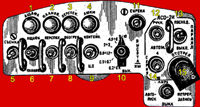 Le pilote avait à sa disposition un boîtier de contrôle fixé sous l'arceau
supérieur du parebrise (cliquer sur le dessin à droite), lui permettant d'agir notamment sur les divers systèmes de reconnaissance, les lance-leurres ou le détecteur d'alerte radar.
Il existait au moins trois modèles de boîtiers différents pour les conteneurs D, N et R. Ainsi, une bonne partie des avions volaient toujours avec le même type de conteneur,
en adéquation avec le boîtier de contrôle monté sur les avions.
Le pilote avait à sa disposition un boîtier de contrôle fixé sous l'arceau
supérieur du parebrise (cliquer sur le dessin à droite), lui permettant d'agir notamment sur les divers systèmes de reconnaissance, les lance-leurres ou le détecteur d'alerte radar.
Il existait au moins trois modèles de boîtiers différents pour les conteneurs D, N et R. Ainsi, une bonne partie des avions volaient toujours avec le même type de conteneur,
en adéquation avec le boîtier de contrôle monté sur les avions.
Le MiG-21R conservait des capacités air-sol, pouvant emporter de classiques conteneurs lance-roquettes UB-16-57UMP ou UB-32, des bombes de 50 à 250kg, ou encore des roquettes S-24 sous les pylônes alaires internes.
Il était susceptible d'assurer le rôle d'intercepteur grâce à une paire de missiles à guidage IR de type RS-2-US eux aussi montés sous les pylônes internes. Des missiles R-3S pouvaient quant à eux prendre place sous les pylônes internes ou externes. Parfois, les carénages des antennes du SPO-3 étaient démontés lors de ces missions puisque inutiles, étant donné que l'électronique du système était logée dans les pods de reconnaissance. Le radar RP-21M du MiG-21PFM était présent dans le nez.
Des MiG-21 biplaces ont bien entendu servi au sein du 294.ORAP, du premier modèle MiG-21U à la dernière version MiG-21UM.
Fitters
 En 1978, le 294.ORAP devint la première des douze unités des VVS à prendre en compte la version de reconnaissance du Strij (Hirondelle) comme étaient surnommés les Su-17 (voir la section "3.3 Aviation d'assaut et
Chasseurs-Bombardiers" pour davantage d'informations à propos des différentes versions du Su-17 > Lien).
Il s'agissait en l'occurence de Su-17M3 "Fitter-H" qui cohabitèrent un temps avec les MiG-21R au sein de deux escadrons distincts, le régiment perdant de fait son troisième escadron. En août 1981, le second escadron était à son tour entièrement rééquipé de Su-17M3 neufs issus de la 64è série. Un total de 30 machines dotèrent le régiment, soit, au milieu des années quatre-vingt, 24
monoplaces Su-17M3 et 6 biplaces Su-17UM3.
En 1978, le 294.ORAP devint la première des douze unités des VVS à prendre en compte la version de reconnaissance du Strij (Hirondelle) comme étaient surnommés les Su-17 (voir la section "3.3 Aviation d'assaut et
Chasseurs-Bombardiers" pour davantage d'informations à propos des différentes versions du Su-17 > Lien).
Il s'agissait en l'occurence de Su-17M3 "Fitter-H" qui cohabitèrent un temps avec les MiG-21R au sein de deux escadrons distincts, le régiment perdant de fait son troisième escadron. En août 1981, le second escadron était à son tour entièrement rééquipé de Su-17M3 neufs issus de la 64è série. Un total de 30 machines dotèrent le régiment, soit, au milieu des années quatre-vingt, 24
monoplaces Su-17M3 et 6 biplaces Su-17UM3.
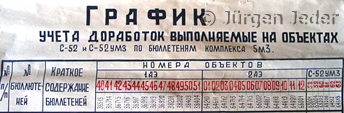
Une remarque s'impose concernant les désignations des versions de reconnaissance des Su-17M3 et M4. Si il existait bien une désignation constructeur pour la version M4 de reco, soit S-54R, tel n'était pas le cas pour le Su-17M3 qui restait S-52 dans tous les cas. On peut d'ailleurs voir sur le tableau ci-dessus que les avions sont désignés simplement S-52 pour les monoplaces et S-52UM3 pour les biplaces. Les Su-17M3 construits à partir de la 54è série portaient la désignation S-52P et, comme les Su-17M4, étaient susceptibles, en plus des missions d'attaque au sol ordinaires, de réaliser deux missions spécifiques, soit la reco avec l'emport de nacelles spécialisées ou les missions anti-radar (conteneur V'youga, missiles Kh-25MP, Kh-27PS et Kh-58U). En pratique, les avions d'une unité dédiée à la reconnaissance comme le 294.ORAP gardaient fort logiquement une configuration figée. Nous désignerons néanmoins les versions de reco avec la lettre R à la fin afin d'éviter les confusions.

 Visite officielle à Allstedt au cours des années 80. On distingue au mur des photos d'équipements de l'OTAN ainsi que des dessins d'avions dont un Lightning et un
Fiat G.91 ainsi que quelques cocardes occidentales. © Collection A.Gordienko.
Visite officielle à Allstedt au cours des années 80. On distingue au mur des photos d'équipements de l'OTAN ainsi que des dessins d'avions dont un Lightning et un
Fiat G.91 ainsi que quelques cocardes occidentales. © Collection A.Gordienko.
Some official visit at Allstedt during the 1980s. Pictures of NATO equipment can be seen in the background, together with aircraft
drawings including a Lightning and a Fiat G.91 and also western cockades. © A.Gordienko Collection.
Les Su-17M3R utilisaient divers conteneurs de reconnaissance spécialement conçus pour la famille des Su-17/-20/-22, qui se fixaient de manière standard en point ventral central.
Désignées "Conteneurs avec complexe de reconnaissance" (KKR - Konteyner Kompleksnoy Razvedki), ces nacelles imposantes longues de 7 mètres nécessitaient un câblage supplémentaire pour l'avion porteur
afin de pouvoir opérer les différents systèmes de reconnaissance embarqués via deux consoles dédiées montées dans le cockpit.
Les nacelles emportées par les Su-17M3R étaient de deux versions différentes, désignées KKR-1 et KKR-1/2. Ces conteneurs modulaires étaient composés d'une partie comprenant les appareils photo et d'un compartiment
où étaient logés les autres moyens de reconnaissance.
 - Le modèle KKR-1 était équipé en première position d'une caméra A-39 (celle-ci était calée en position
verticale ou oblique jusqu'à 55° avant le vol). Elle était utilisée à basse ou moyenne altitude jusqu'à 5000 mètres. Venait ensuite une caméra panoramique PA-1 munie de prismes rotatifs permettant de photographier des bandes de terrain à gauche et à droite de l'avion. La longueur de la bande photographiée correspondait à dix fois l'altitude de vol. Enfin, un appareil UA-47 (> Lien) composé de deux objectifs était destiné aux prises de vues nocturnes. Il était pour cela associé à quatre cassettes KDF-38 contenant des fusées éclairantes FP-100. Ces cassettes n'étaient montées que lorqu'elles étaient nécessaires, leur emplacement restant sinon vide comme cela peut être constaté sur certaines photos illustrant cet article ou dans la galerie photo s'y rapportant. Les photographies panoramiques et nocturnes n'étaient pas prises au-delà de 1200 mètres d'altitude. La partie arrière abritait au début un système SIGINT SRS-9 Viraj, ensuite remplacé par le SRS-13 Tangaj, dont on pouvait distinguer les panneaux diélectriques sur les flancs arrières des nacelles.
La suite SRS-13 était destinée à la localisation des radars, leur classification et l'identification de leurs fréquences. Ainsi équipé du SRS-13, le conteneur prenait la désignation de KKR-1T (pour davantage d'informations sur ce conteneur, visiter ce > Lien /
vidéo détaillant un KKR-1T des LSK/LV > Lien).
- Le modèle KKR-1 était équipé en première position d'une caméra A-39 (celle-ci était calée en position
verticale ou oblique jusqu'à 55° avant le vol). Elle était utilisée à basse ou moyenne altitude jusqu'à 5000 mètres. Venait ensuite une caméra panoramique PA-1 munie de prismes rotatifs permettant de photographier des bandes de terrain à gauche et à droite de l'avion. La longueur de la bande photographiée correspondait à dix fois l'altitude de vol. Enfin, un appareil UA-47 (> Lien) composé de deux objectifs était destiné aux prises de vues nocturnes. Il était pour cela associé à quatre cassettes KDF-38 contenant des fusées éclairantes FP-100. Ces cassettes n'étaient montées que lorqu'elles étaient nécessaires, leur emplacement restant sinon vide comme cela peut être constaté sur certaines photos illustrant cet article ou dans la galerie photo s'y rapportant. Les photographies panoramiques et nocturnes n'étaient pas prises au-delà de 1200 mètres d'altitude. La partie arrière abritait au début un système SIGINT SRS-9 Viraj, ensuite remplacé par le SRS-13 Tangaj, dont on pouvait distinguer les panneaux diélectriques sur les flancs arrières des nacelles.
La suite SRS-13 était destinée à la localisation des radars, leur classification et l'identification de leurs fréquences. Ainsi équipé du SRS-13, le conteneur prenait la désignation de KKR-1T (pour davantage d'informations sur ce conteneur, visiter ce > Lien /
vidéo détaillant un KKR-1T des LSK/LV > Lien).
 - Le modèle KKR-1/2 gardait les mêmes caméras, mais la partie arrière abritait cette fois le module n°2 qui comprenait un complexe d'imagerie thermique 8R Zima (Hiver) et une station de reconnaissance télévisuelle 429T Tchibis-B (Vanneau). Les images TV et IR étaient relayées vers une station au sol grâce à une suite de transmission de type data link
Trassa, dont on pouvait distinguer les antennes sous le conteneur. Le module n°3, monté en lieu et place du n°2, comprenait quant à lui une suite SIGINT SRS-13 Tangaj et un bloc de reconnaissance laser Chpil'-2M. Dans ce dernier cas, la désignation du conteneur devenait KKR-1T/2.
- Le modèle KKR-1/2 gardait les mêmes caméras, mais la partie arrière abritait cette fois le module n°2 qui comprenait un complexe d'imagerie thermique 8R Zima (Hiver) et une station de reconnaissance télévisuelle 429T Tchibis-B (Vanneau). Les images TV et IR étaient relayées vers une station au sol grâce à une suite de transmission de type data link
Trassa, dont on pouvait distinguer les antennes sous le conteneur. Le module n°3, monté en lieu et place du n°2, comprenait quant à lui une suite SIGINT SRS-13 Tangaj et un bloc de reconnaissance laser Chpil'-2M. Dans ce dernier cas, la désignation du conteneur devenait KKR-1T/2.
Il existait également un pod KKR-1M équipé d'un appareil AFA-42/100 (> Lien) ainsi que de systèmes Tchibis-B et Zima. La caméra AFA-42/100 d'une focale de 1000mm, utilisée également par l'Aviation à long rayon d'action à bord de Tu-16R et Tu-22R, visait spécifiquement la photographie oblique à longue distance depuis la haute altitude.
Les Su-17M4R utilisaient quant à eux des conteneurs KKR-2A (caméras A-39, AP-402, systèmes TV Aist-M et IR Zima), KKR-2T (SRS-13 Tangaj), KKR-2Ch (SLAR Chtik-2M), KKR-2P (Chpil'-2M) et KKR-2E (Efir-1M) - pour les systèmes Aist-M, Chtik-2M et Efir-1M voir > Le 11.ORAP.
Beaucoup des systèmes de reconnaissance embarqués dans les nacelles des Su-17M3R et M4R ont ensuite été intégrés aux Su-24MR. Le complexe infrarouge 8R Zima enregistrait les images thermiques sur film et permettait fort logiquement la reconnaissance nocturne. Un carénage rectandulaire orienté dans le sens du vol situé sous le conteneur trahissait sa présence. Le système de reconnaissance TARK 429T Tchibis-B installé devant lui assurait la transmission des images en direct vers une station au sol installée dans un camion. Le prix à payer était cependant une image de moindre qualité. Le laser Chpil'-2M fonctionnait avec un illuminateur et un photo détecteur. Les images enregistrées sur film étaient de meilleure résolution que les images thermiques, mais proches ce celles télévisées. La fonction illuminateur n'était pas nécessaire de jour.
 "Le 15 août [1973], une zone d'exercice temporaire fut déployée et installée près de la ville de
Soellichau. Deux maquettes gonflables de missiles PERSHING, deux maquettes de batteries de missiles HAWK et une
station radio de type R-821 y furent observés. Quatre MANGROVE [Yak-27R] de Werneuchen ainsi que trois
FISHBED H [MiG-21R] d'Allstedt furent observés au-dessus de la zone au cours probablement d'un exercice ou d'une
compétition pour appareils de reconnaissane." © USMLM.
"Le 15 août [1973], une zone d'exercice temporaire fut déployée et installée près de la ville de
Soellichau. Deux maquettes gonflables de missiles PERSHING, deux maquettes de batteries de missiles HAWK et une
station radio de type R-821 y furent observés. Quatre MANGROVE [Yak-27R] de Werneuchen ainsi que trois
FISHBED H [MiG-21R] d'Allstedt furent observés au-dessus de la zone au cours probablement d'un exercice ou d'une
compétition pour appareils de reconnaissane." © USMLM.
"On 15 August [1973], a probable mobile range was deployed and set up near the town of Soellichau.
Observed at the range were two inflatable PERSHING missile mock-ups, two HAWK missile battery mock-ups, and
an R-821 ground to air radio. Four Werneuchen-based MANGROVE [Yak-27R] and three Allstedt FISHBED H [MiG-21R] were observed
conducting reconnaissance flights over the range area during a probable exercise/competition for
reconnaissance aircraft." © USMLM.
 Un terrain de manoeuvres de la 8ème Armée interarmes de la garde situé au NO de Naumburg était régulièrement
utilisé lors des missions d'entraînement de routine, quand du personnel au sol et sans doute une station mobile de recueil des données transmises par data link y étaient déployés
(fichier Google Earth montrant les routes suivies habituellement par les appareils du 294.ORAP à télécharger > Lien -
créé par M.Bischoff).
L'approche d'un objectif se faisait à basse altitude avant de grimper à l'altitude de travail au moment opportun. De nuit, les bombes éclairantes étaient larguées durant le montée et l'avion redescendait ensuite afin de photographier sous la lueur des flares.
Les Su-17M3R et M4R conservaient toutes leurs capacités offensives et défensives (les Su-17M3R emportaient souvent sous le pylône intérieur gauche une nacelle de contre-mesures électroniques SPS-141[142/143]MVG Gvozdika), ce qui représentait un progrès appréciable par rapport au MiG-21R limité à l'emport de bombes et de roquettes sous deux pylônes.
Le Cours d'entraînement au combat de l'aviation de reconnaissance comprenait pratiquement les mêmes spécificités que la chasse-bombardement. Le 294.ORAP utilisait d'ailleurs régulièrement le champ de tir de Belgern.
Aussi, si un appareil en mission de reconnaissance armée repérait un objectif particulièrement important comme des missiles nucléaires, il avait pour instruction de mener une attaque sans attendre.
De nombreux exercices de tir étaient réalisés chaque année en plus des tâches spécifiques à la reconnaissance qui exigeaient de maîtriser aussi bien la reconnaissance photographique que celle à vue, ainsi que la gestion des
systèmes SIGINT, IR et TV.
Un terrain de manoeuvres de la 8ème Armée interarmes de la garde situé au NO de Naumburg était régulièrement
utilisé lors des missions d'entraînement de routine, quand du personnel au sol et sans doute une station mobile de recueil des données transmises par data link y étaient déployés
(fichier Google Earth montrant les routes suivies habituellement par les appareils du 294.ORAP à télécharger > Lien -
créé par M.Bischoff).
L'approche d'un objectif se faisait à basse altitude avant de grimper à l'altitude de travail au moment opportun. De nuit, les bombes éclairantes étaient larguées durant le montée et l'avion redescendait ensuite afin de photographier sous la lueur des flares.
Les Su-17M3R et M4R conservaient toutes leurs capacités offensives et défensives (les Su-17M3R emportaient souvent sous le pylône intérieur gauche une nacelle de contre-mesures électroniques SPS-141[142/143]MVG Gvozdika), ce qui représentait un progrès appréciable par rapport au MiG-21R limité à l'emport de bombes et de roquettes sous deux pylônes.
Le Cours d'entraînement au combat de l'aviation de reconnaissance comprenait pratiquement les mêmes spécificités que la chasse-bombardement. Le 294.ORAP utilisait d'ailleurs régulièrement le champ de tir de Belgern.
Aussi, si un appareil en mission de reconnaissance armée repérait un objectif particulièrement important comme des missiles nucléaires, il avait pour instruction de mener une attaque sans attendre.
De nombreux exercices de tir étaient réalisés chaque année en plus des tâches spécifiques à la reconnaissance qui exigeaient de maîtriser aussi bien la reconnaissance photographique que celle à vue, ainsi que la gestion des
systèmes SIGINT, IR et TV.
Le 294.ORAP ne devait pas survivre très longtemps à la réunification allemande gagnant même à l'occasion de son retrait final, au printemps 1991, le titre de premier régiment de la 16.VA à évacuer le territoire de l'ex-R.D.A. Il faut cependant noter que, contrairement aux autres départs des unités de la 16.VA observés à la même époque, le départ du 294.ORAP ne s'effectuait pas dans le cadre du retrait général négocié des forces soviétiques d'Allemagne, mais en vertu des accords dits CFE (Conventional Forces in Europe), portant sur la réduction des forces conventionnelles en Europe (2). Le 21 mai, le régiment quittait définitivement Allstedt pour se rendre à Jekabpils en Lettonie où le 886.ORAP équipé de Su-17M4R était stationné. Mais, toujours afin de rester en règle avec les accords CFE, un escadron du 294.ORAP fut rapidement transféré à Domna dans le distict de Transbaïkalie, où ses Su-17M3R constituèrent un escadron du 125.ORAP local qui mettait en ligne deux autres escadrons armés de Su-24MR. Ces Su-17M3R furent retirés du service en 1995 et convoyés vers la base de stockage de Step'. Le matériel et le personnel de l'autre escadron du 294.ORAP furent quant à eux ventilés entre la Transcaucasie à Vaziani afin de renforcer le 313.ORAP volant alors sur Su-17M4R et l'Ouzbékistan à Karchi-Khanabad où se trouvait le 87.ORAP avec des Su-17M3R.
 |
La politique, la reconnaissance et les femmes | |
| MiG-21R PHOTO PAGE | ||
| Su-17M3R PHOTO PAGE |
notes
(1)
Il existe plusieurs interprétations de la désignation des MiG-15bis de reconnaissance : MiG-15bisR, MiG-15R-bis et MiG-15Rbis.
Nous nous tiendrons à cette dernière désignation, puisque c'est cette dernière qui figure sur le document technique en haut de page.
(2) Les accords C.F.E. étaient signés le 19 novembre 1990, à Paris, à l'occasion de la Conférence sur la Sécurité et la Coopération en Europe (en
abrégé C.S.C.E, devenue aujourd'hui une organisation avec pour abbréviation O.S.C.E.), par 22 pays de l'Alliance atlantique et du pacte de
Varsovie.
| Plan du site - Sitemap |
