
 Outre les unités aériennes équipées d'avions de reconnaissance, le Groupe des forces soviétiques en Allemagne a aligné
à partir de la fin des années soixante-dix des drones de reconnaissance dont les escadrons furent successivement subordonnés à la 16.VA, à l'état-major
des armées terrestres et enfin de nouveau à la 16.VA. Ce type d'appareil offrait alors une plus grande précision dans la collecte du renseignement que les
vecteurs pilotés de l'époque, c'est-à-dire les MiG-21R et les Yak-28R.
Outre les unités aériennes équipées d'avions de reconnaissance, le Groupe des forces soviétiques en Allemagne a aligné
à partir de la fin des années soixante-dix des drones de reconnaissance dont les escadrons furent successivement subordonnés à la 16.VA, à l'état-major
des armées terrestres et enfin de nouveau à la 16.VA. Ce type d'appareil offrait alors une plus grande précision dans la collecte du renseignement que les
vecteurs pilotés de l'époque, c'est-à-dire les MiG-21R et les Yak-28R.
Des drones de reconnaissance Toupolev Tu-143 (> Lien) équipèrent
cinq escadrons autonomes d'avions de reconnaissance sans pilote (OEBSR - Otdel'naya Eskadril'ya Bespilotnikh Samoletov-Razvedtchikov) en RDA.
Il n'existe malheureusement pas d'information accessible ni de témoignage connu permettant d'affirmer ou d'infirmer que le prédécesseur du Tu-143,
à savoir le Lavotchkine La-17R - complexe TBR-1 - (> Lien) entré en service au milieu des annnées soixante, était auparavant en service au sein du GFSA.
On peut néanmoins imaginer que si tel était le cas, les Missions militaires de liaison ou les services d'écoute électronique occidentaux auraient fini par les observer comme ce fut
le cas pour les Tu-143.
 Fort de l'expérience accumulée avec les extraordinaires drones de reconnaissance à long rayon d'action Tu-123 - complexe DBR-1 Yastreb (Faucon) -
(> Lien), l'OKB-156 de Toupolev commença à développer un nouveau système de reconnaissance
désigné VR-3 Reys (Voyage) comprenant le drone Tu-143 au milieu des années soixante.
Le cahier des charges exigeait notamment que l'appareil puisse voler à haute et basse
altitude (de 50 à 5000 mètres - en conditions opérationnelles, de 100 à 3000 mètres semble-t-il) y compris en terrain montagneux, avoir une signature radar limitée et pouvoir être récupéré
dans une zone équivalente à un carré de 500 mètres de côté (ou 700 mètres selon les sources).
Le premier vol d'un Tu-143 eut lieu en décembre 1970 et les essais officiels se terminèrent en 1976 - le système étant officiellement adopté par l'Armée soviétique en 1982, non sans qu'il ne
soit utilisé auparavant comme lors de l'exercie "Zapad 81".
Mais dès 1972, un premier lot d'une dizaine d'appareils - en quelque sorte une pré-série - fut construit à l'usine de Koumertaou en Bachkirie, la production en série débutant ensuite pour se
terminer en 1989 après que 950 exemplaires aient été assemblés (le complexe Reys a également été exporté en Tchécoslovaquie, en Roumanie et en Syrie où il connut le combat
au-dessus du Liban).
Fort de l'expérience accumulée avec les extraordinaires drones de reconnaissance à long rayon d'action Tu-123 - complexe DBR-1 Yastreb (Faucon) -
(> Lien), l'OKB-156 de Toupolev commença à développer un nouveau système de reconnaissance
désigné VR-3 Reys (Voyage) comprenant le drone Tu-143 au milieu des années soixante.
Le cahier des charges exigeait notamment que l'appareil puisse voler à haute et basse
altitude (de 50 à 5000 mètres - en conditions opérationnelles, de 100 à 3000 mètres semble-t-il) y compris en terrain montagneux, avoir une signature radar limitée et pouvoir être récupéré
dans une zone équivalente à un carré de 500 mètres de côté (ou 700 mètres selon les sources).
Le premier vol d'un Tu-143 eut lieu en décembre 1970 et les essais officiels se terminèrent en 1976 - le système étant officiellement adopté par l'Armée soviétique en 1982, non sans qu'il ne
soit utilisé auparavant comme lors de l'exercie "Zapad 81".
Mais dès 1972, un premier lot d'une dizaine d'appareils - en quelque sorte une pré-série - fut construit à l'usine de Koumertaou en Bachkirie, la production en série débutant ensuite pour se
terminer en 1989 après que 950 exemplaires aient été assemblés (le complexe Reys a également été exporté en Tchécoslovaquie, en Roumanie et en Syrie où il connut le combat
au-dessus du Liban).

 Outre les Tu-143 eux-mêmes, le complexe VR-3 comprenait les véhicules nécessaires à leur mise en oeuvre, leur reconditionnement pour un nouveau tir et l'analyse des informations collectées.
Il s'agissait essentiellement de transporteurs TZM-143 (châssis de véhicule BAZ-135MB > Lien),
de rampes de lancement mobiles SPU-143 (> Lien),
de trois véhicules de test et de maintenance formant l'ensemble KPK-143 (un groupe électrogène APA-50M monté sur châssis ZiL-131 (> Lien)
et deux stations de contrôle et de tests mobiles KIPS-1 et KIPS-2 - Kontrol'no-Proverotchniye Stantsii) et enfin d'une unité de traitement des informations POD-3 (développement et
interprétation photo et video, analyse radiations, transmission des informations à qui de droit).
Quatre complexes VR-3 étaient affectés à chaque escadron, ce qui représentait un total de douze exemplaires de Tu-143
(quatre transporteurs avec deux drones chacun et quatre rampes de lancement avec un drone chacune).
De plus, une ou plusieurs camionnettes UAZ-452T-2 (Topoprivyazchik - Topographe) destinées à relever les coordonnées géographiques
du site avant le lancement (> Lien 1 / > Lien 2)
accompagnaient l'escadron, de même que un ou deux véhicules de lutte contre les incendies de type AA-40
(châssis ZiL-131 > Lien).
A cela s'ajoutaient les véhicules nécessaires pour faire les pleins de carburant, huile, air comprimé etc.
Un escadron était susceptible de se (re)déployer dans un rayon de 500km.
Outre les Tu-143 eux-mêmes, le complexe VR-3 comprenait les véhicules nécessaires à leur mise en oeuvre, leur reconditionnement pour un nouveau tir et l'analyse des informations collectées.
Il s'agissait essentiellement de transporteurs TZM-143 (châssis de véhicule BAZ-135MB > Lien),
de rampes de lancement mobiles SPU-143 (> Lien),
de trois véhicules de test et de maintenance formant l'ensemble KPK-143 (un groupe électrogène APA-50M monté sur châssis ZiL-131 (> Lien)
et deux stations de contrôle et de tests mobiles KIPS-1 et KIPS-2 - Kontrol'no-Proverotchniye Stantsii) et enfin d'une unité de traitement des informations POD-3 (développement et
interprétation photo et video, analyse radiations, transmission des informations à qui de droit).
Quatre complexes VR-3 étaient affectés à chaque escadron, ce qui représentait un total de douze exemplaires de Tu-143
(quatre transporteurs avec deux drones chacun et quatre rampes de lancement avec un drone chacune).
De plus, une ou plusieurs camionnettes UAZ-452T-2 (Topoprivyazchik - Topographe) destinées à relever les coordonnées géographiques
du site avant le lancement (> Lien 1 / > Lien 2)
accompagnaient l'escadron, de même que un ou deux véhicules de lutte contre les incendies de type AA-40
(châssis ZiL-131 > Lien).
A cela s'ajoutaient les véhicules nécessaires pour faire les pleins de carburant, huile, air comprimé etc.
Un escadron était susceptible de se (re)déployer dans un rayon de 500km.

 Cet appareil de reconnaissance diurne était propulsé par un réacteur Izotov TR3-117 fournissant une poussée de 640kg qui lui permettait de voler à la vitesse maximale de 950 km/h.
Un propulseur d'appoint à carburant solide SPRD-251 largable assistait le lancement du drone sous un angle de 15 degrés - le poids au décollage atteignait 1600 kg avec cette fusée.
Le cône nasal détachable offrait ainsi la possibilité de monter trois suites de reconnaissance distinctes.
Il y avait d'une part le complexe traditionnel de reconnaissance photographique équipé d'un appareil panoramique PA-1 (> Lien) avec 120 mètres de film,
d'autre part une variante de reconnaissance TV composée de la suite I-429B Tchibis-B (Vanneau) transmettait les images par data link vers les postes de commandement
(les meilleures prises de vue étaient obtenues depuis une altitude de 200 mètres; de plus leurs coordonnées géographiques étaient transmises également en temps réel par radio), et, enfin,
un ensemble Sigma-R destiné à analyser le degré des radiations dans l'air à l'aide de dosimètres - le résultat des relevés le long de la route de vol était
également retransmis au sol par liaison radio.
C'est le système de contrôle automatique embarqué ABSU-143 (Avtomatitcheskaya Bortovaya Sistema Oupravleniya) qui assurait entre autres la stabilité du drone en fonction de son centre de gravité,
le respect des paramètres de vol, déclenchait les prises de vues ou encore le relevé des coordonnées.
Contrairement au Tu-141 développé à peu près en même temps (voir "Versions, dérivés et cousins" en bas de page), le Tu-143 ne s'éloignait guère du champ de bataille avec un rayon d'action généralement
limité à 60-70km, soit environ 13 minutes de vol.
Cet appareil de reconnaissance diurne était propulsé par un réacteur Izotov TR3-117 fournissant une poussée de 640kg qui lui permettait de voler à la vitesse maximale de 950 km/h.
Un propulseur d'appoint à carburant solide SPRD-251 largable assistait le lancement du drone sous un angle de 15 degrés - le poids au décollage atteignait 1600 kg avec cette fusée.
Le cône nasal détachable offrait ainsi la possibilité de monter trois suites de reconnaissance distinctes.
Il y avait d'une part le complexe traditionnel de reconnaissance photographique équipé d'un appareil panoramique PA-1 (> Lien) avec 120 mètres de film,
d'autre part une variante de reconnaissance TV composée de la suite I-429B Tchibis-B (Vanneau) transmettait les images par data link vers les postes de commandement
(les meilleures prises de vue étaient obtenues depuis une altitude de 200 mètres; de plus leurs coordonnées géographiques étaient transmises également en temps réel par radio), et, enfin,
un ensemble Sigma-R destiné à analyser le degré des radiations dans l'air à l'aide de dosimètres - le résultat des relevés le long de la route de vol était
également retransmis au sol par liaison radio.
C'est le système de contrôle automatique embarqué ABSU-143 (Avtomatitcheskaya Bortovaya Sistema Oupravleniya) qui assurait entre autres la stabilité du drone en fonction de son centre de gravité,
le respect des paramètres de vol, déclenchait les prises de vues ou encore le relevé des coordonnées.
Contrairement au Tu-141 développé à peu près en même temps (voir "Versions, dérivés et cousins" en bas de page), le Tu-143 ne s'éloignait guère du champ de bataille avec un rayon d'action généralement
limité à 60-70km, soit environ 13 minutes de vol.

 Avant le tir, le véhicule lanceur était positionné à un point donné déterminé avec l'équipement désigné "Kvadrat" (Carré). Parmi le matériel utilisé à cette fin, on trouvait
un théodolite 2T2 surnommé "thermomètre" (> Lien) et un gyrocompas 1G17
débarqués d'un véhicule UAZ-452T-2. Autant de matériel également mis en oeuvre par les unités d'artillerie. On comprendra d'autant mieux l'importance de cette étape en réalisant
que le profil de vol qui ne permettait de réaliser que deux virages était pré-programmé au sol pour être ensuite introduit dans l'unité BVD-1 du Tu-143 juste avant le décollage.
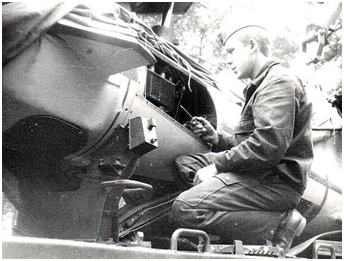
Le personnel effectuant les tests pré-vol et lançant la mise à feu se trouvait à l'intérieur de la cabine du lanceur SPU-143 (> Lien 1 /
> Lien 2 /
> Lien 3) dont le toit était en fibre de verre pour des raisons de résistence mécanique.
Celui-ci subissait en effet le jet de la fusée d'appoint au décollage et se déformait momentanément. Une plaque de protection articulée était auparavant rabattue devant le pare-brise,
tandis que deux autres plaques plus petites montées de part et d'autre du radiateur en temps normal étaient placées devant celui-ci afin de le préserver au moment du décollage.
Avant l'atterrissage, le réacteur Izotov s'arrêtait et le drone prenait une pente de montée importante pour casser sa vitesse. Un premier parachute de freinage (dont le
carénage est visible à la base de la dérive) se déployait alors.
Avant le tir, le véhicule lanceur était positionné à un point donné déterminé avec l'équipement désigné "Kvadrat" (Carré). Parmi le matériel utilisé à cette fin, on trouvait
un théodolite 2T2 surnommé "thermomètre" (> Lien) et un gyrocompas 1G17
débarqués d'un véhicule UAZ-452T-2. Autant de matériel également mis en oeuvre par les unités d'artillerie. On comprendra d'autant mieux l'importance de cette étape en réalisant
que le profil de vol qui ne permettait de réaliser que deux virages était pré-programmé au sol pour être ensuite introduit dans l'unité BVD-1 du Tu-143 juste avant le décollage.
Le personnel effectuant les tests pré-vol et lançant la mise à feu se trouvait à l'intérieur de la cabine du lanceur SPU-143 (> Lien 1 /
> Lien 2 /
> Lien 3) dont le toit était en fibre de verre pour des raisons de résistence mécanique.
Celui-ci subissait en effet le jet de la fusée d'appoint au décollage et se déformait momentanément. Une plaque de protection articulée était auparavant rabattue devant le pare-brise,
tandis que deux autres plaques plus petites montées de part et d'autre du radiateur en temps normal étaient placées devant celui-ci afin de le préserver au moment du décollage.
Avant l'atterrissage, le réacteur Izotov s'arrêtait et le drone prenait une pente de montée importante pour casser sa vitesse. Un premier parachute de freinage (dont le
carénage est visible à la base de la dérive) se déployait alors.
{kind=link}
{kind=link}
{kind=link}
 Ce dernier était ensuite largué et un parachute plus important logé dans le gros carénage situé à l'arrière au-dessus de la tuyère du réacteur était à sont tour déployé au-dessus du Tu-143 (photo ci-contre).
Le train d'atterrissage pouvait dès lors sortir, de même que des sondes d'impact. Lorsque celles-ci touchaient le sol, une rétro-fusée située sous
le parachute était mise à feu, réduisant ainsi la vitesse de chute de 6m/sec à 2m/sec. Finalement, quand le train touchait le sol,
la compression de ses amortisseurs enclenchait le largage du parachute et de sa fusée afin d'éviter le retournement
éventuel du drone par une rafale de vent (> Video).
Un camion TZM-143 muni d'un bras articulé était chargé de récupérer le drone une fois posé.
Ce dernier était ensuite largué et un parachute plus important logé dans le gros carénage situé à l'arrière au-dessus de la tuyère du réacteur était à sont tour déployé au-dessus du Tu-143 (photo ci-contre).
Le train d'atterrissage pouvait dès lors sortir, de même que des sondes d'impact. Lorsque celles-ci touchaient le sol, une rétro-fusée située sous
le parachute était mise à feu, réduisant ainsi la vitesse de chute de 6m/sec à 2m/sec. Finalement, quand le train touchait le sol,
la compression de ses amortisseurs enclenchait le largage du parachute et de sa fusée afin d'éviter le retournement
éventuel du drone par une rafale de vent (> Video).
Un camion TZM-143 muni d'un bras articulé était chargé de récupérer le drone une fois posé.
 Préparation des parachutes.
Préparation des parachutes.
Parachute preparation.
En principe, un Tu-143 devait pouvoir être de nouveau prêt à repartir en mission au bout de quatre heures, à condition bien sûr qu'il n'ait pas subi de dommages. Une fois paré,
un Tu-143 pouvait décoller dans un délai de 15 minutes.
La durée de vie d'un appareil était estimée à cinq missions. Ensuite, il était révisé ou réformé.
Afin de palier aux impondérables et accélérer le processus de récupération si le drone atterrissait en dehors de la zone de l'escadron, la possibilité de ramener celui-ci par hélicoptère Mi-8T avait été étudiée
et mise en pratique au moins en URSS. Une balise radio MRP-56 était montée à cette fin sur le drone. Le transport du Tu-143 se faisait évidemment par héli-treuillage à la vitesse de 140 km/h sous un câble de
15 mètres ou à 200 km/h si la longueur de ce dernier était réduite à 5 mètres. Un petit parachute était susceptible d'être attaché à la queue du Tu-143 à des fins de stabilisation.
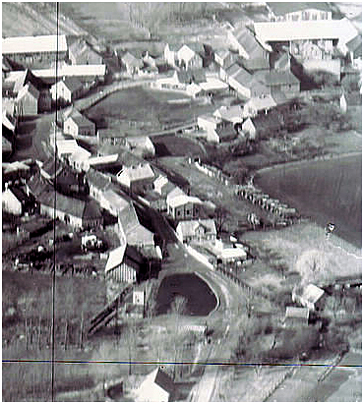 Un village de RDA vu depuis un Tu-143.
Un village de RDA vu depuis un Tu-143.
An East German village seen from a Tu-143.
 Si le complexe VR-3 fut utilisé par différentes branches des forces armées soviétiques, les unités le mettant en oeuvre étaient à l'origine subordonnées aux VVS,
donc la 16.VA en RDA - du moins lors l'entrée en service du système de reconnaissance "Reys" au sein du GFSA. Certains escadrons destinés à rejoindre la RDA (269. et 270.OEBSR - vraisemblablement les autres
unités aussi) furent mis sur pied à Martsiena - près de Madona - en Lettonie où se trouvait 924è Centre d'entraînement au combat et de conversion opérationnelle pour le personnel des avions sans pilote
(Tsentr Boevogo Primeneniya i Pereoutchivaniya Litchnogo Sostava Tchastey Bespilotnikh Samoletov). Cette unité regroupait le 14è Escadron autonome d'essai et d'instruction d'appareils
aériens sans pilote (OIIE BSR - Otdel'naya Issledovatel'sko-Instrouktorskaya Eskadril'ya Bespilotnikh Letatel'nikh Apparatov) responsable des systèmes VR-2, ainsi que le
275.OIIE BSR pour les systèmes VR-3. C'est en 1979-80 que les escadrons furent subordonnés aux Armées. Chaque Armée disposait d'une petite section chargée de la gestion de ses éléments aériens
(UAA - Oupravlenie Armiya Aviatsii). Finalement, les OEBSR se retrouvèrent de nouveau sous le gyron des VVS au printemps 1988.
Si le complexe VR-3 fut utilisé par différentes branches des forces armées soviétiques, les unités le mettant en oeuvre étaient à l'origine subordonnées aux VVS,
donc la 16.VA en RDA - du moins lors l'entrée en service du système de reconnaissance "Reys" au sein du GFSA. Certains escadrons destinés à rejoindre la RDA (269. et 270.OEBSR - vraisemblablement les autres
unités aussi) furent mis sur pied à Martsiena - près de Madona - en Lettonie où se trouvait 924è Centre d'entraînement au combat et de conversion opérationnelle pour le personnel des avions sans pilote
(Tsentr Boevogo Primeneniya i Pereoutchivaniya Litchnogo Sostava Tchastey Bespilotnikh Samoletov). Cette unité regroupait le 14è Escadron autonome d'essai et d'instruction d'appareils
aériens sans pilote (OIIE BSR - Otdel'naya Issledovatel'sko-Instrouktorskaya Eskadril'ya Bespilotnikh Letatel'nikh Apparatov) responsable des systèmes VR-2, ainsi que le
275.OIIE BSR pour les systèmes VR-3. C'est en 1979-80 que les escadrons furent subordonnés aux Armées. Chaque Armée disposait d'une petite section chargée de la gestion de ses éléments aériens
(UAA - Oupravlenie Armiya Aviatsii). Finalement, les OEBSR se retrouvèrent de nouveau sous le gyron des VVS au printemps 1988.

 Selon un témoignage posté sur un forum russe, toutes les unités de BPLA (Bespilotniy Letatelniy Apparat - véhicules aériens sans pilote)
se déployaient en même temps deux fois par an sur le polygone de Wittstock.
C'est bien là que des observations de Tu-143 sont rapportées dans le compte-rendu
annuel pour 1983 de la USMLM. Celui de 1984 mentionne quant à lui que la MMFL a photographié des drones à plusieurs reprises à Wittstock cette année-là.
Dans la mesure où la photo ci-contre à droite est d'origine française (bien qu'elle puisse avoir été prise par une autre mission militaire de liaison), il s'agit peut-être
de l'une d'entre elles. Les véhicules de ces unités ont cependant été observés sur divers champs de manoeuvre tels que Magdebourg (Letzlinger Heide) et Redlin.
Vu l'exiguité du territoire de la RDA englobant de plus Berlin-Ouest en son centre, les Tu-143 étaient généralement accompagnés de chasseurs chargés de les abattre en cas de perte de contrôle.
Toujours d'après un témoignage, un appareil du 269.OEBSR équipé d'une suite de reconnaissance TV aurait néanmoins été perdu en 1986 dans le Müritzsee, près de Lärz.
Mais le déploiement bisannuel à Wittstock n'était sans doute pas une règle systématique, car les unités s'exerçaient également sur des polygones situés en URSS, tels
que Kapoustine Yar, Mary (Djebel - Turkmenistan) ou Tchimkent (Kazakhstan).
Le nombre d'heures de vol annuelles de ce type d'unité était paraît-il très faible, de l'ordre de 2 à 3 heures.
Selon un témoignage posté sur un forum russe, toutes les unités de BPLA (Bespilotniy Letatelniy Apparat - véhicules aériens sans pilote)
se déployaient en même temps deux fois par an sur le polygone de Wittstock.
C'est bien là que des observations de Tu-143 sont rapportées dans le compte-rendu
annuel pour 1983 de la USMLM. Celui de 1984 mentionne quant à lui que la MMFL a photographié des drones à plusieurs reprises à Wittstock cette année-là.
Dans la mesure où la photo ci-contre à droite est d'origine française (bien qu'elle puisse avoir été prise par une autre mission militaire de liaison), il s'agit peut-être
de l'une d'entre elles. Les véhicules de ces unités ont cependant été observés sur divers champs de manoeuvre tels que Magdebourg (Letzlinger Heide) et Redlin.
Vu l'exiguité du territoire de la RDA englobant de plus Berlin-Ouest en son centre, les Tu-143 étaient généralement accompagnés de chasseurs chargés de les abattre en cas de perte de contrôle.
Toujours d'après un témoignage, un appareil du 269.OEBSR équipé d'une suite de reconnaissance TV aurait néanmoins été perdu en 1986 dans le Müritzsee, près de Lärz.
Mais le déploiement bisannuel à Wittstock n'était sans doute pas une règle systématique, car les unités s'exerçaient également sur des polygones situés en URSS, tels
que Kapoustine Yar, Mary (Djebel - Turkmenistan) ou Tchimkent (Kazakhstan).
Le nombre d'heures de vol annuelles de ce type d'unité était paraît-il très faible, de l'ordre de 2 à 3 heures.

 Sur 24 escadrons de "Reys", 17 furent dissous en 1989. Avec de nouveau le retour de ces unités sous le contrôle de l'armée peu après et malgré la nécessité de garder davantage de ce type
d'unité active, les temps n'étaient plus favorables à une telle évolution et 70% des effectifs passèrent à la trappe (
> Lien vers stockage de véhicules). Les Tu-143 ont encore volé longtemps dans des contextes
différents. Le M-143 (système VR-3VM), version du Tu-143 faisant office de cible entrée en service en 1985 a continué de servir d'objectif pour les missiles sol-air (1).
D'autres - à moins qu'il ne s'agisse
de Tu-143 ? - ont terminé leur carrière en tant que cible pour l'aviation de chasse notamment en Ukraine, comme en témoignent quelques
vidéos : > Lien 1 / > Lien 2. (2).
Plus récemment, quelques Tu-143 ukrainiens ont été utilisés dans le cadre de la guerre du Donbass.
Sur 24 escadrons de "Reys", 17 furent dissous en 1989. Avec de nouveau le retour de ces unités sous le contrôle de l'armée peu après et malgré la nécessité de garder davantage de ce type
d'unité active, les temps n'étaient plus favorables à une telle évolution et 70% des effectifs passèrent à la trappe (
> Lien vers stockage de véhicules). Les Tu-143 ont encore volé longtemps dans des contextes
différents. Le M-143 (système VR-3VM), version du Tu-143 faisant office de cible entrée en service en 1985 a continué de servir d'objectif pour les missiles sol-air (1).
D'autres - à moins qu'il ne s'agisse
de Tu-143 ? - ont terminé leur carrière en tant que cible pour l'aviation de chasse notamment en Ukraine, comme en témoignent quelques
vidéos : > Lien 1 / > Lien 2. (2).
Plus récemment, quelques Tu-143 ukrainiens ont été utilisés dans le cadre de la guerre du Donbass.
| Unités de VR-3 Reys | |||||
|---|---|---|---|---|---|
| Unité | NPC | Formation | Subordination | Base | Remarques |
| 265.OEBSR | 45314 | 1977-78 | 16.VA (jusque 1980) | Stendal (jusque 1987) / Zerbst (1987 - 1990) | déplacé à Zerbst en 1987-88 suite à la formation du 440.ovp BU |
| 1406.UAA, 3.OA (Magdebourg) (1980 - 04/1988) | |||||
| 16.VA (04/1988 - 1990) | |||||
| 268.OEBSR | 38361 | 1977-78 | 16.VA (jusque 1980) | Nohra (1978 - 1990) | |
| 1407.UAA, 8.GvOA (Nohra) (1980 - 04/1988) | |||||
| 16.VA (04/1988 - 1990) | |||||
| 269.OEBSR | 38676 | 1977 à Martsiena (Lettonie) | 16.VA (jusque 1980) | Brandis (08/1977 - 1989) / Dresden-Heller (1989 - 1990) | déplacé à Dresden-Heller en 1989 suite à la formation du 485.ovp BU |
| 1409.UAA, 1.GvTA (Dresden) (1980 - 04/1988) | |||||
| 16.VA (04/1988 - 1990) | |||||
| 270.OEBSR | 38706 | 1977-78 à Martsiena (Lettonie) | 16.VA (jusque 1980) | Parchim (1978 - 1990) | |
| 1410.UAA, 2.GvTA (Fürstenberg) (1980 - 04/1988) | |||||
| 16.VA (04/1988 - 1990) | |||||
| 290.OEBSR | 05040 | 1977-78 | 16.VA (jusque 1980) | Kietz (jusque 11/89) / Prenzlau (01/12/89) | déplacé à Prenzlau après l'abandon de l'établissement du 487.ovp BU sur ce nouvel aérodrome |
| 1408.UAA, 20.GvOA (Eberswalde) (1980 - 04/1988) | |||||
| 16.VA (04/1988 - 1990) | |||||
Versions, dérivés et cousins
- Outre le drone cible M-143 évoqué en fin d'article, un autre dérivé du Tu-143 simplement baptisé "143" était une version destinée à larguer des tracts. Un total de 19kg de matériel pouvait se loger dans
le nez spécialement adapté à cette mission particulière, le largage se faisant en bloc ou en séquence.
- On pourrait penser que le Tu-141 - système VR-2 Strij (Hirondelle) - était le prédécesseur du Tu-143, mais il n'en est rien. Son premier vol remonte à 1974. La cellule rappelle le Tu-143, mais elle
est plus grande et le rayon d'action de ce drone très supérieur : 950km. La mise en oeuvre de cet appareil construit à 152 exemplaires était fort similaire à celle du Tu-143. Cependant, à cause
d'une taille et d'un poids plus importants, sa rampe de lancement était remorquée. Il existait aussi une variante cible M-141.
- Une version plus performante du Tu-143 désignée Tu-243 (système VR-3D "Reys-D") a fait sont premier vol en 1987 et est entrée officiellement en service en 1995. La capacité en carburant a été augmentée pour
donner un rayon d'action de 360km et la suite de reconnaissance améliorée avec notamment un capteur IR, permettant d'opérer de jour et de nuit. Une version cible "Reis-DM" a également été dérivée. Cette
dernière bénéficie aussi d'un système de contrôle de vol amélioré avec la possibilité de changer quinze fois d'altitude et de virer à vingt reprises. Mis à part une petite altération du cône nasal, la cellule
du Tu-243 est demeurée identique, donnant lieu à de nombreuses erreurs d'identification.
notes
(1)
Le 4 octobre 2011, un Tu-154M de Sibir Airlines reliant Tel Aviv à Novosibirsk fut abattu par un missile 5V28 provenant d'une batterie de S-200V
(> Lien) alors qu'il survolait la Mer Noire à 11.000 mètres. Si les circonstances de l'accident sont controversées,
nous noterons que l'exercice de la
défence anti-aérienne russo-ukrainien qui était alors en cours faisait usage d'un ou de plusieurs Tu-143 ou plus probablement de leur version cible
M-143 (> Lien).
(2)
En 2009, une cinquantaine de Tu-143 ukrainiens ont été vendus à l'entreprise Belspetsvnechtekhnika de Minsk au Belarus (> Lien) où ils ont
été transformés en drones cibles pour être ensuite vendus en Syrie
(> Lien).
| Plan du site - Sitemap |
